FishSense
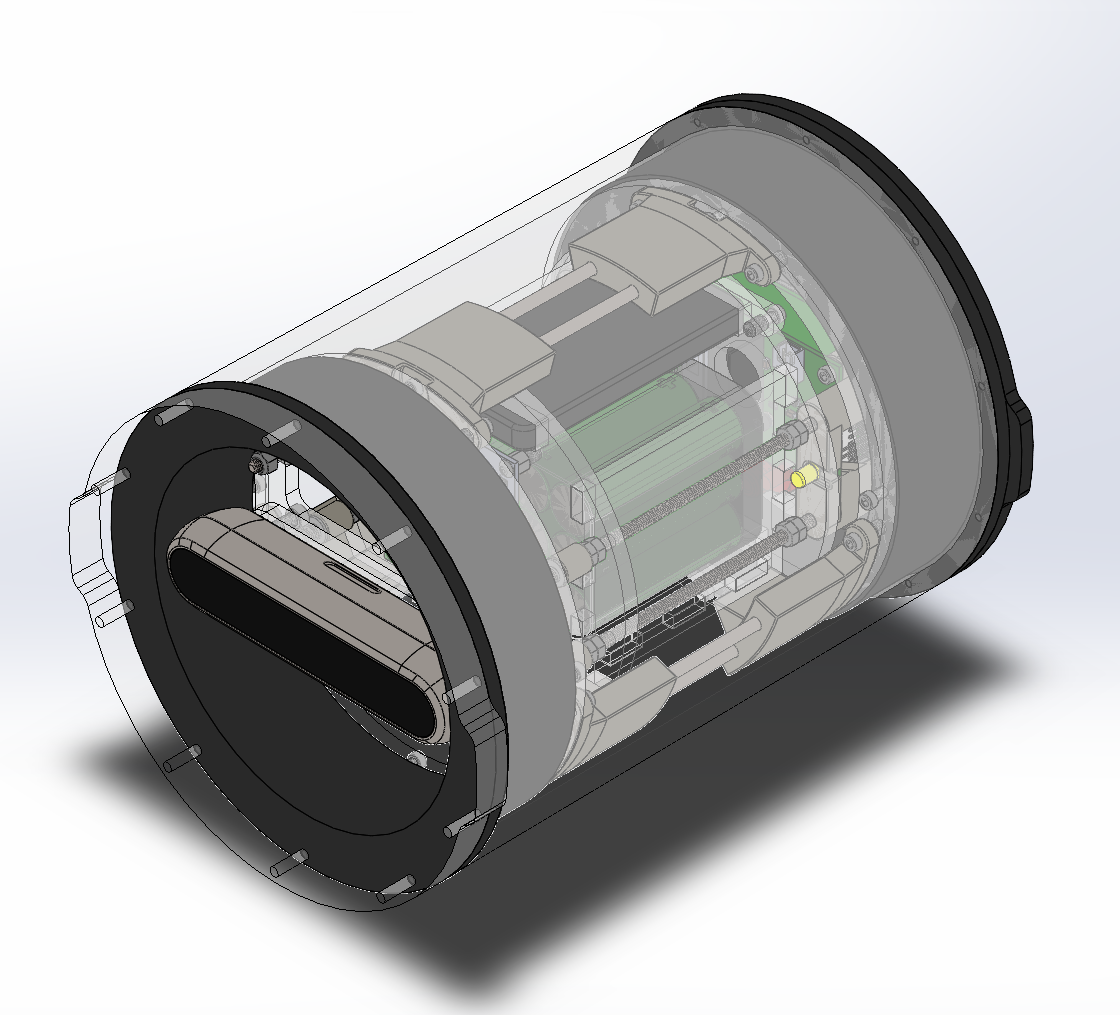
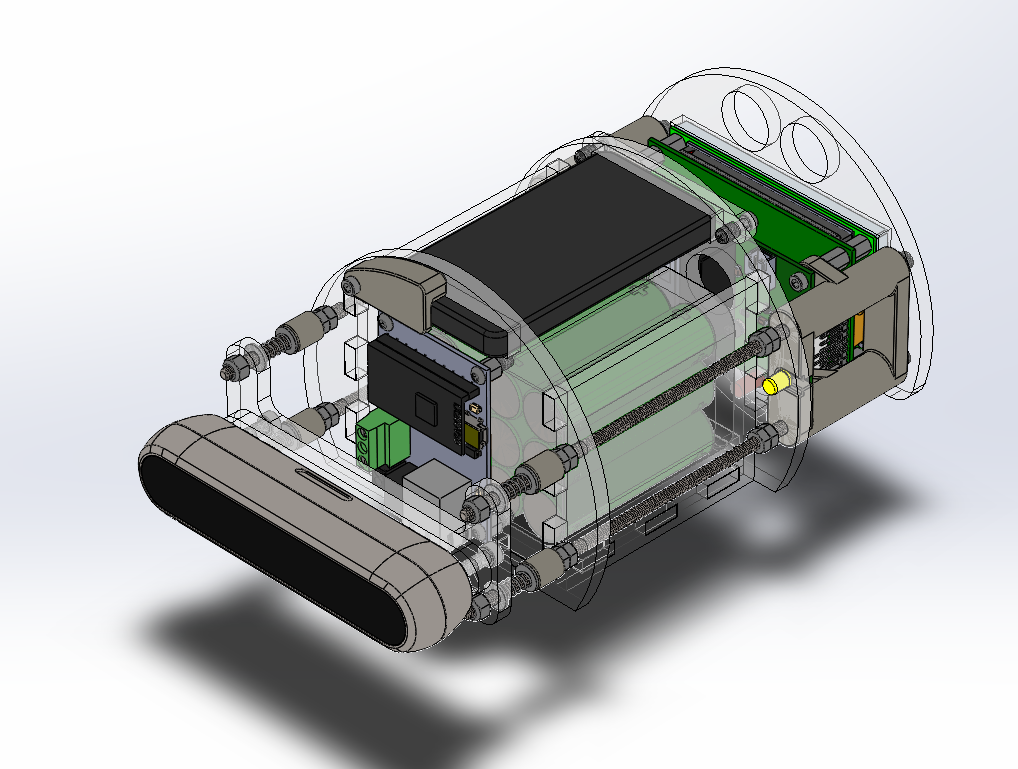
Fishsense is a UCSD research project that utilizes depth cameras and AI to catalogue fish populations. My job was to design the waterproof enclosure for its batteries, data storage, and AI processor.
Of course, this was my first serious project, so I made quite a few mistakes along the way. I think I've learned from them, and I hope I can work better and faster with future projects.
Cycloidal Drive
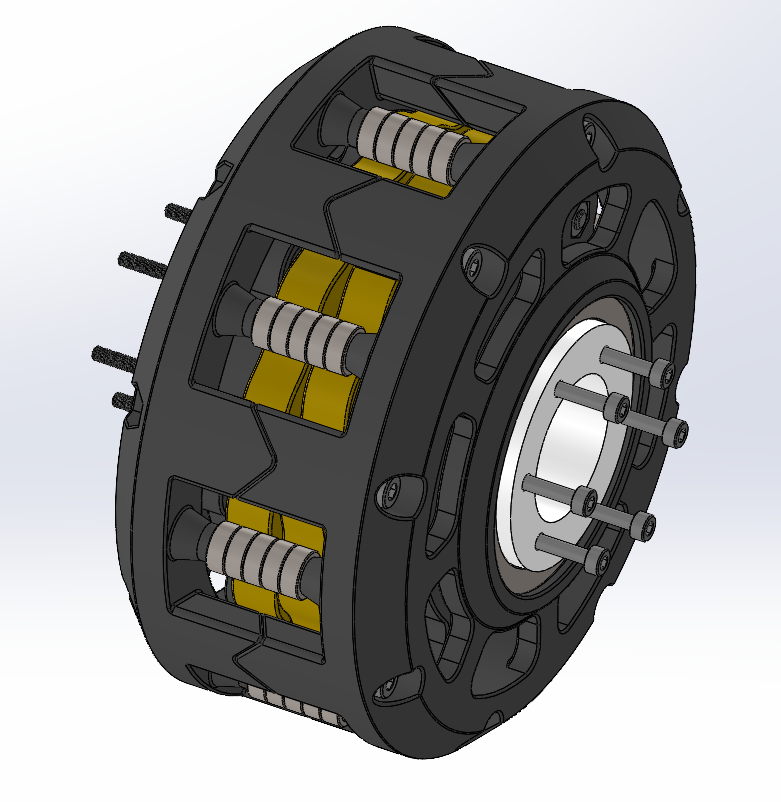
This is a 15:1 cycloidal drive reducer. I hope to use it to reduce BLDC motors for a 6-axis arm project, similar to Damian Lickindorf's Atlas robot.
The reducer has a hollow shaft, so it will be possible to run cables through it. The design is quite heavily inspired by Damian's OpenCyRe and used guidance from this blog post for the cycloidal disks themselves.
Pharma Pill

In Summer 2022, I participated in UC Berkeley Engineering's T-PREP (Transfer Pre-Engineering Program). In this program, the cohort was split into 10 groups, who each designed a prototype project that could help solve a problem in the world.
My group created PharmaPill, a secure pill dispenser to help reduce the 15,000 deaths each year caused by prescription drug overdose. It would be a secure container with several layers of physical protection, along with validation before actually dispensing pills. It would be filled by pharmacists, and locked until the patient returns it when their prescription is complete.
In the end, the T-PREP program was combined with the PREP program for freshman students, totalling 32 teams. There were 10 awards given among the teams, and our project received 4 of them.
This was a crude prototype constructed in 26 hours, with very limited part availability. We designed this prototype to use a pill "hopper" and an iris mechanism to limit the number of pills that come through, but this approach is overcomplicated and still has the chance to dispense too many or too few pills. If we ever revisit this project, we will likely use more of a pill "magazine" that would be customized to each distinct pill type.
Mechanical 7-Segment Display
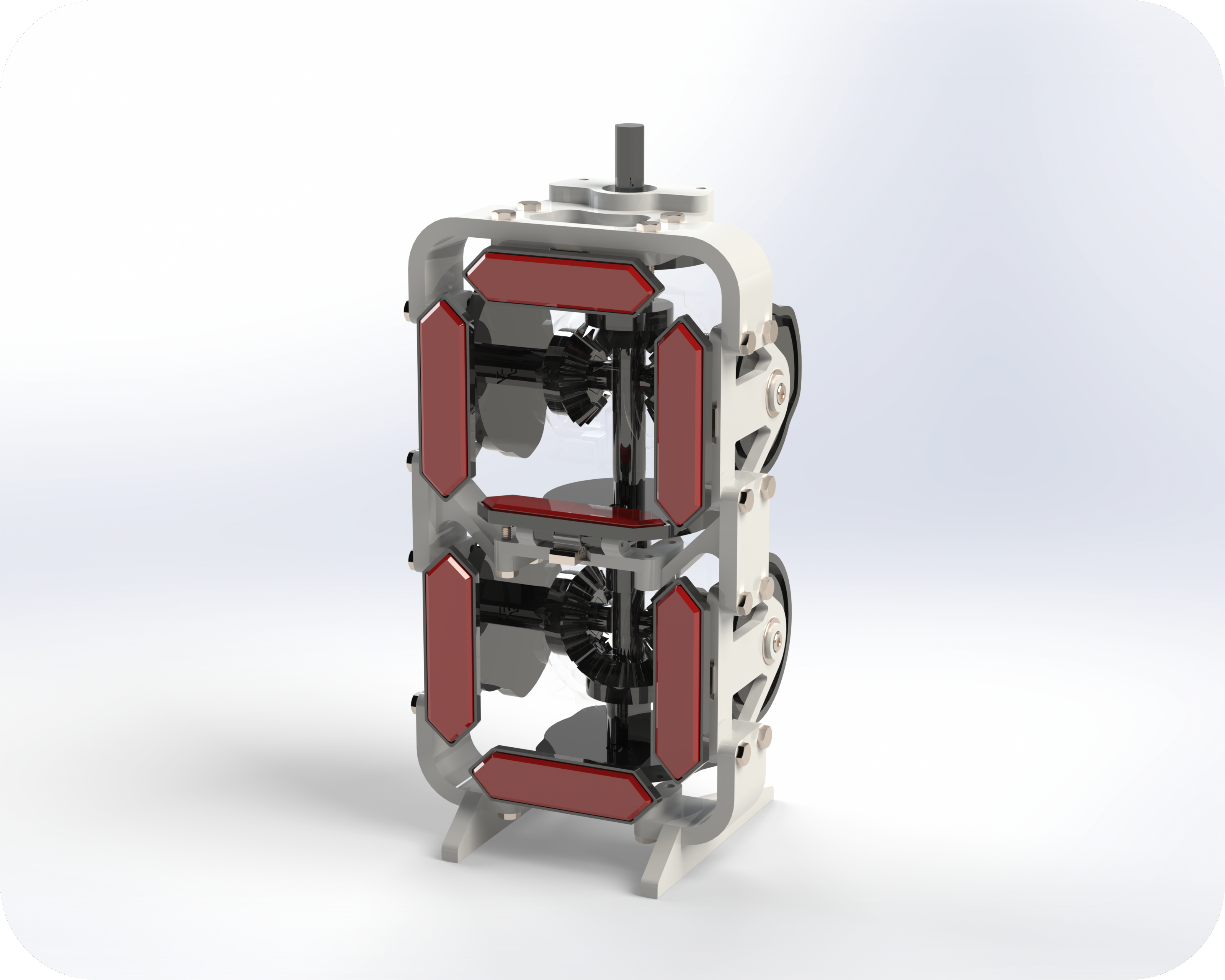
Designed and built for UC Berkeley's Design of Planar Machinery class (MECENG 130).
Takes a single rotational input at the top, and will cycle through the digits 0-9 in each rotation of the input. The physical prototype was 3D-printed.
Each segment has a "digit cam" that encodes its movement to the rotational input. They each have a slot in the bottom of them, in which a follwer rides. Because it is a slot, the follower is pushed both forward and back, eliminating the need for a spring. The follower has a rack on it, which drives a pinion that is then attached to the segment itself. All seven of these digit cams are then driven by two sets of three bevel gears, thereby connecting all seven segments to the input.